

 Esta barra, indica o nível de dificuldade encontrado para cada experiência realizada, sendo:
Esta barra, indica o nível de dificuldade encontrado para cada experiência realizada, sendo:
"VERDE", indicação de nível 1 a 5 (Fácil);
"AMARELO", indicação de nível 6 a 8 (Médio);
VERMELHO, indicação de nível 9 e 10 (Difícil);
Arduino ROVERBot
***To get this project in English language, visit the instructables website: http://www.instructables.com/id/Arduino-ROVERBot/ ***
Este post tem como objetivo apresentar a construção de um ROVER utilizando o Arduino como micro-controlador e a interface bluetooth de um celular Android como interface RC (radio controle).
O aplicativo Android utilizado é o "bluetooth RC Controller", que está disponível no "Play Store".
Este aplicativo proporciona um controle via interface de direcionamento e ou via interface de posicionamento digital (accelerômetro) do próprio celular que está sendo utilizado como controle.
Este é o link para o aplicativo de controle:
https://play.google.com/store/apps/details?id=braulio.calle.bluetoothRCcontroller&hl=pt_BR
 |
| Aplicativo para Android Bluetooth RC Controller |
 |
| Tela do controle via Teclas direcionais |
MATERIAL:
1 x Tamiya Twin Motor Gear Box - KIT;
1 x Tamiya Tank Chassis - KIT;
1 x Arduino UNO;
1 x Módulo Bluetooth HC-05 ou compatível;
1 x AdaFruit-DC_Motor-Shield
1 x Bateria 11,7 V / 3500 mAh;
Para maiores informações sobre o shield controlador de motor AdaFruit, visite o website abiaxo, onde também é possível obter a biblioteca usada no projeto.
https://learn.adafruit.com/adafruit-motor-shield/overview
Você pode usar também um shield genérico, desde que tenha compatibilidade de pinos é possível utilizar a bilbioteca sem nenhum problema.
 |
| ADAFRUIT - Arduino Motor Shield |
 |
| Bluetooth HC-05 Module |
 |
| Tamiya Tank Chassis KIT |
 |
| Tamiya Twin DC Motor Gear Box - KIT |
 |
| Tamiya Twin DC Motor Gear Box - 58:1 and 203:1 |
 |
| Tamiya Twin DC Motor Gear Box - KIT |
MONTAGEM:
Assista o video abiaxo para saber exatamente como montar o KIT Tamiya Gear BOX.
Algumas imagens da montagem:
 |
| Tamiya Twin Motors Gear Box Montado com relação 203:1 |
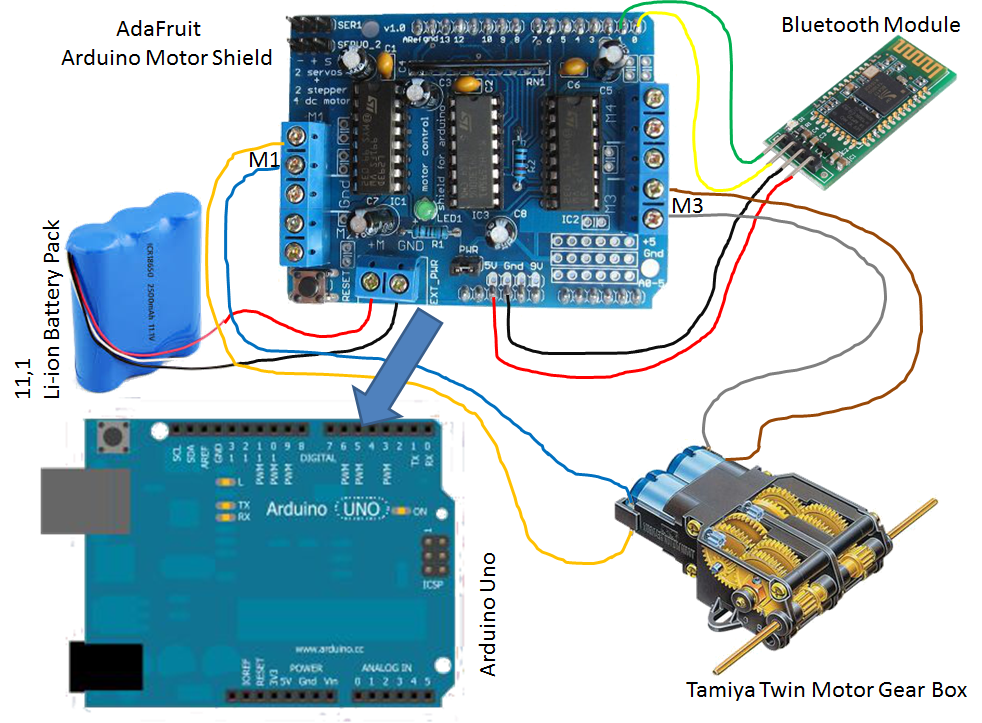
INTERLIGAÇÃO ELETRÔNICA:
Após feita a montagem dos KITs Tamiya Gear Box e do Chassis, é possível começar a interligação dos componentes eletrônicos do sistema.
A figura abaixo mostra como devem ser feitas as ligações.
Basicamente deve-se:
1 - Plugar o AdaFruit Motor Shield no Arduino;
2 - Conectar o módulo bluetooth:-
RX do módulo bluetooth no TX do Arduino (pino 0)
TX do módulo bluetooth no RX do Arduino (pino 1)
GND do módulo bluetooth no GND do Arduino
VCC do módulo bluetooth no +5V do Arduino
3 - Conectar o motor direito do Tamyia Gear Kit no Motor 1 do AdaFruit Motor Shield;
4 - Conectar p motor esquerdo do Tamiya Gear Kit no Motor 3 do AdaFruit Motor Shield;
Aqui vale uma observação: O sentido de rotação deve ser testado, caso esteja invertido, inverter os fios do motor para assim inverter o sentido de rotação.
5 - Conectar a bateria Li-ion aos pinos GND e +M do AdaFruit Motor Shield.
No AdaFruit Motor Shield o Junp PWR deve estar fechado (assim o Arduino será alimentado pela bateria de 11,1V bem como os motores.
CODIFICAÇÃO:
Obtenha todos os arquivos no GitHub abaixo:
https://github.com/Arduinobymyself/ArduinoRoverBot.git
O Arduino deve ser programado sem que o TX/RX do módulo Bluetooth esteja conectado aos pinos 0 e 1 do arduino. Isso impediria o Arduino de receber os dados compilados da IDE.
https://github.com/Arduinobymyself/ArduinoRoverBot.git
O Arduino deve ser programado sem que o TX/RX do módulo Bluetooth esteja conectado aos pinos 0 e 1 do arduino. Isso impediria o Arduino de receber os dados compilados da IDE.
Caso tenha algum problema com os arquivos mencionados, solicite via email para:
arduinobymyself@gmail.com
FUNCIONAMENTO:
Primeiramente, ligue o Arduino ROVERBot. O módulo bluetooth irá começar a piscar o LED vermelho (indicando que não está conectado a nenhum computador ou componente de controle MASTER);
Abra o Aplicativo de controle no seu celular Android, inicialmente ele estará desconectado o que será idnicado por um aviso vermelho piscante;
Ao abrir, será perguntado se você deseja ativar o bluetooth do dispositivo (caso ele ainda não esteja ativado), responda sim;
No menu de opções do aplicativo, selecione a opção "connect";
Irão aparecer os dispositivos disponíveis para conexão (geralmente o módulo o bluetooth par Arduino chama-se LINVOR), selecione o dispositivo e efetue a conexão. O LED verde deve acender no módulo bluetooth e também no aplicavo irá aparecer uma indicação verde de conexão.
Pronto agora o celular e o ROVERBot estão conectados via bluetooth.
Use as teclas direcionais para movimentar nas diversas direções permitidas.
É possível também usar o acelerômetro do celular para controlar o ROVERBot por movimentação do celular nas diversas direções.
Agora é só se divertir com este excelente ROVER, Forte, Rápido e Robusto.
FUNCIONAMENTO:
Primeiramente, ligue o Arduino ROVERBot. O módulo bluetooth irá começar a piscar o LED vermelho (indicando que não está conectado a nenhum computador ou componente de controle MASTER);
Abra o Aplicativo de controle no seu celular Android, inicialmente ele estará desconectado o que será idnicado por um aviso vermelho piscante;
Ao abrir, será perguntado se você deseja ativar o bluetooth do dispositivo (caso ele ainda não esteja ativado), responda sim;
No menu de opções do aplicativo, selecione a opção "connect";
Irão aparecer os dispositivos disponíveis para conexão (geralmente o módulo o bluetooth par Arduino chama-se LINVOR), selecione o dispositivo e efetue a conexão. O LED verde deve acender no módulo bluetooth e também no aplicavo irá aparecer uma indicação verde de conexão.
Pronto agora o celular e o ROVERBot estão conectados via bluetooth.
Use as teclas direcionais para movimentar nas diversas direções permitidas.
É possível também usar o acelerômetro do celular para controlar o ROVERBot por movimentação do celular nas diversas direções.
Agora é só se divertir com este excelente ROVER, Forte, Rápido e Robusto.
VIDEOS:
http://youtu.be/9B4_5goUybU
Veja este projeto no instructables: http://www.instructables.com/id/Arduino-ROVERBot/
http://youtu.be/9B4_5goUybU
Veja este projeto no instructables: http://www.instructables.com/id/Arduino-ROVERBot/
FOTOS:
Algumas fotos reais do projeto em execução.
































